麻省理工学院新研究:绷紧肌肉就能操控无人机,比摇杆更省事
|
副标题[/!--empirenews.page--]
来源:智东西 近日,麻省理工学院计算机科学与人工智能实验室(CSAIL)的研究团队利用肌肉传感器和运动检测算法,开发出一个“行为控制机器人”系统,能通过肌肉收紧来远程遥控无人机。 目前,搭载这个系统的无人机能够对 8 种手势做出反应,反应正确率达到 81.6%。 利用机器人完成工作可以解放人类的生产力。要达到这一目的,需要机器人和人之间达到较高的配合度。此前的研究从语音识别、自然语言处理、计算机视觉、触觉、手势等角度进行了探索。结果显示,语音、触屏控制不够灵敏,已有的传感器系统也比较笨重。 麻省理工学院的研究人员认为让机器人理解人类的非语言指令可以解决这些问题。据此,他们研发出一款端到端手势控制系统。这个系统用肌电信号传感器接收用户手势,用算法判断指令内容,不需要进行繁琐的数据训练或校准,配套传感器的尺寸也比较小。 这项研究已经入选 2020 年人机交互国际会议(ACM/IEEE HRI),这是人机交互领域最重要的会议之一。 论文发表在计算机学术网站 ACM Digital Library 上,论文题目为《使用肌肉和动作传感器实现即插即用手势控制(Plug-and-Play Gesture Control Using Muscle and Motion Sensors)》。 论文链接:https://dl.acm.org/doi/10.1145/3319502.3374823
一、用传感器捕捉肌电信号,设备更轻巧 肌电信号与人体的运动意图相关。根据之前的研究,肌电信号和相关肌肉动力学之间的建模可被用于提升外骨骼、假肢等辅助机器人的性能。 本项研究中,研究人员尝试利用肌电信号传感器(也称肌电图传感器,EMG),将人类手部运动时的肌电信号传输给机器人。 用表面肌电电极从参与者的右上臂提取肌电信号,在肱二头肌短头和肱三头肌长头上放置 24mm 预涂导电胶的 Covidien 电极。前臂上的装置包括肌电图电极和一个惯性测量设备(IMU,由一个加速度计和一个陀螺仪组成)。
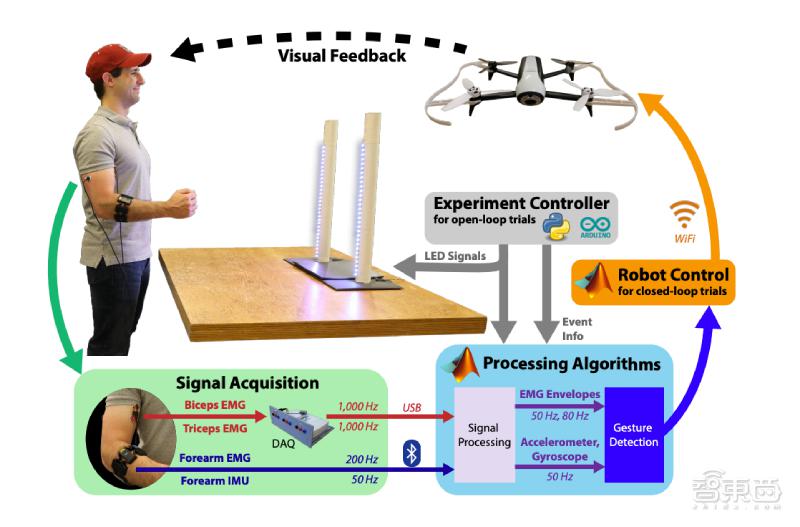
可穿戴式肌电信号传感器会差异化增强收集到的每对肌电信号。数据收集系统以 1KHz 的频率对肌电信号进行采样,并通过 USB 把它们传输到可视化仿真工具 Simulink R2018b。
▲传感器捕捉肌电信号的过程 论文指出,使用肌电信号传感器有几个好处: 首先,降低了模型的复杂性。不需要照相机等动作捕捉设备,设备更轻巧; 其次,排除了遮挡、环境噪音等因素的干扰; 另外,肌肉信号能够反映出肉眼观测不到的运动状态(比如关节僵硬),有助于提升人机交互系统的灵活性。
▲“行为控制机器人(Conduct-a-Bot)”系统 二、用算法理解手势含义,实现即插即用 根据论文,让机器人理解手势指令有两个好处。首先,相比于连续运动,手势有助于增加系统的稳健性;其次,这种设计可以减少需要的电极数目,降低了模型的复杂性,增加了可部署性。 研究人员共设计了 8 种手势,分别是:手臂僵直、转动(分为顺时针转动和逆时针转动)、握拳(分为左手、右手、向上、向下)、手腕弯曲和伸展。
对于大多数手势引起的肌电信号,研究人员使用自适应在线聚类算法(Online clustering for adaptive thresholding)帮助机器人理解。 (编辑:PHP编程网 - 黄冈站长网) 【声明】本站内容均来自网络,其相关言论仅代表作者个人观点,不代表本站立场。若无意侵犯到您的权利,请及时与联系站长删除相关内容! |







 浙公网安备 33038102330482号
浙公网安备 33038102330482号